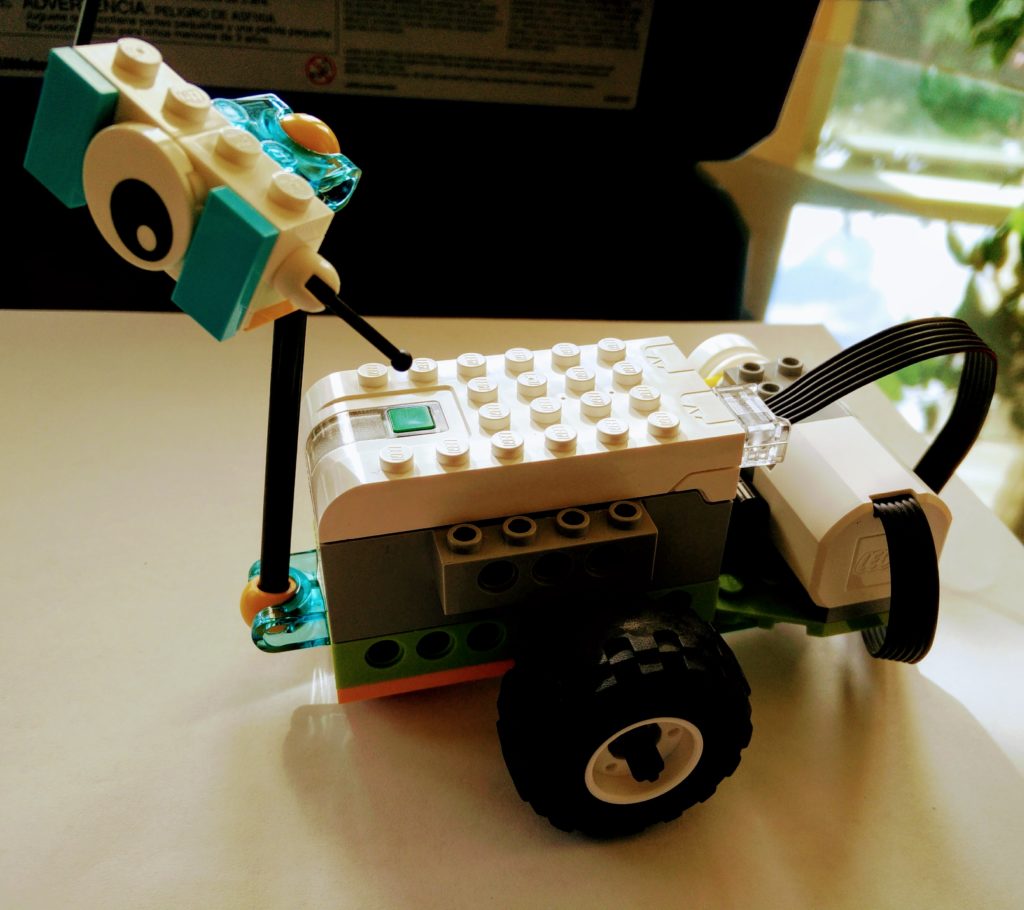
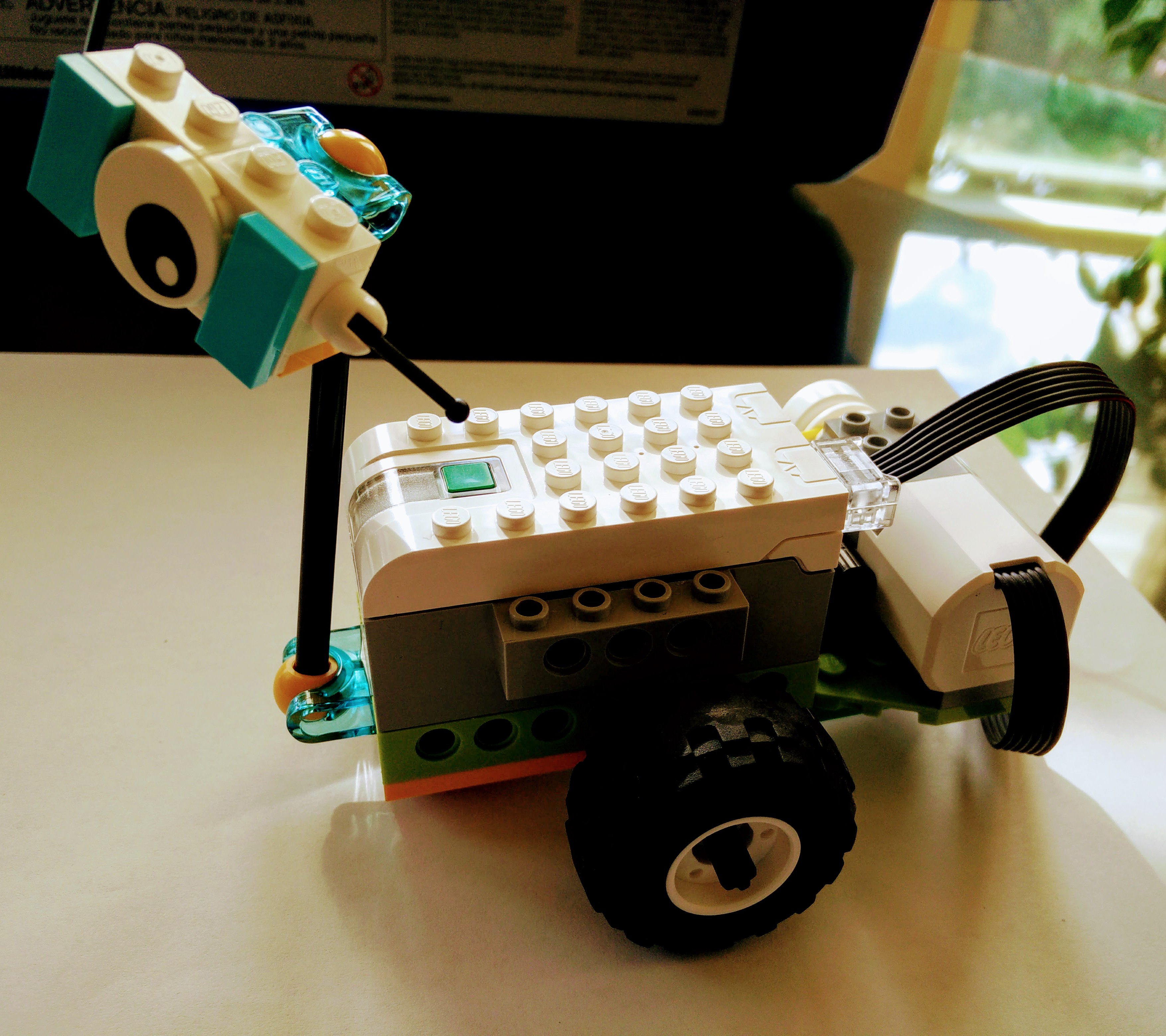
For my first project I decided to build Milo the Science Rover from the Lego WeDo 2.0 Education Kit.
At first, I built Milo to only move forward. After I finished the project, I then added the motion sensor. This will let you create and program Milo’s object detector arm using the Motion Sensor Input. The sensor will be able to detect objects. You will have to use the program provided for this. Afterwards, I added the tilt sensor. This will let you create and program Milo’s messaging arm using the Tilt Sensor. Milo will be able to send a message about his discoveries. You will have to use the program provided for this.
Your child will learn ways scientists can reach remote places to explore like on Mars.
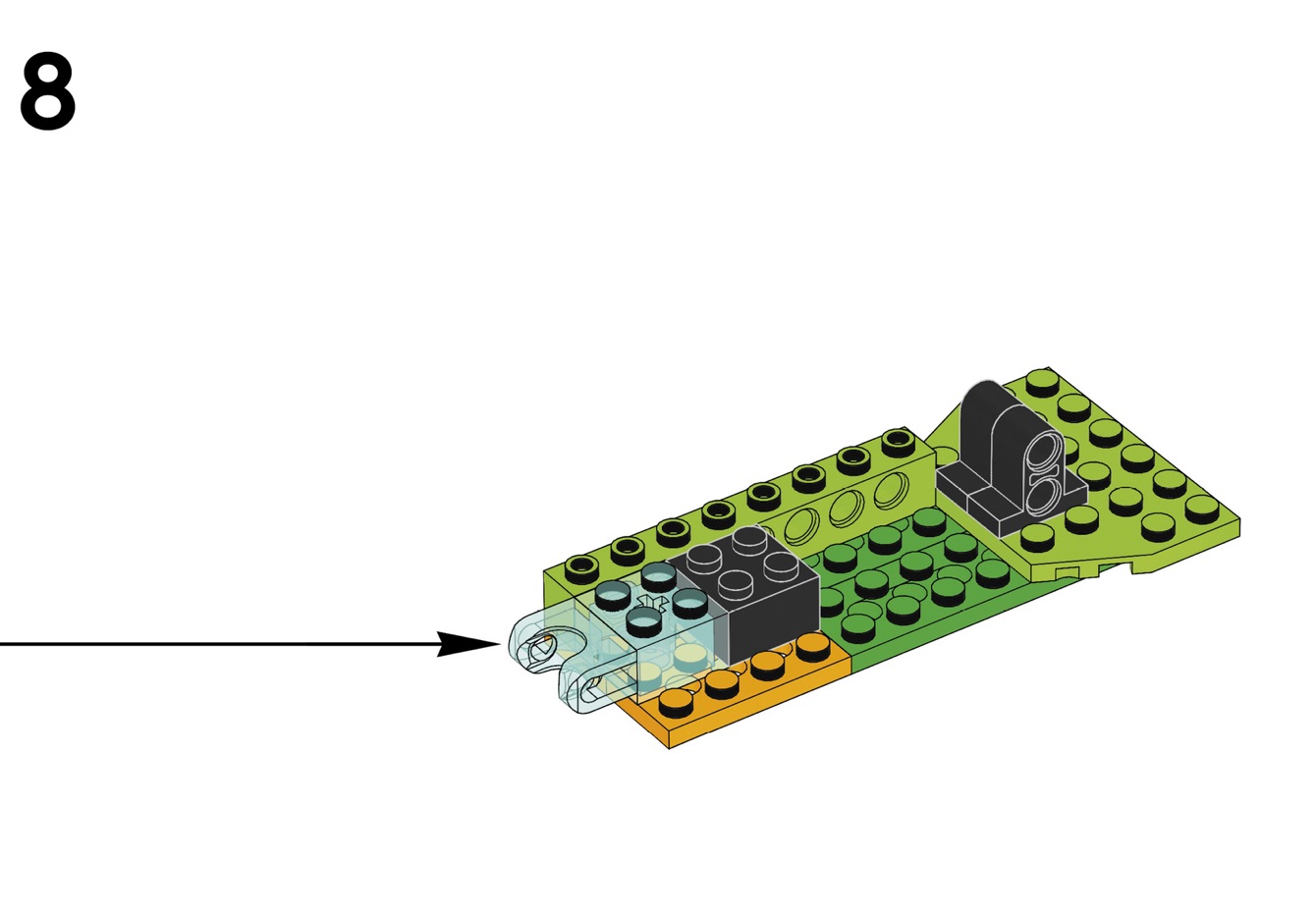
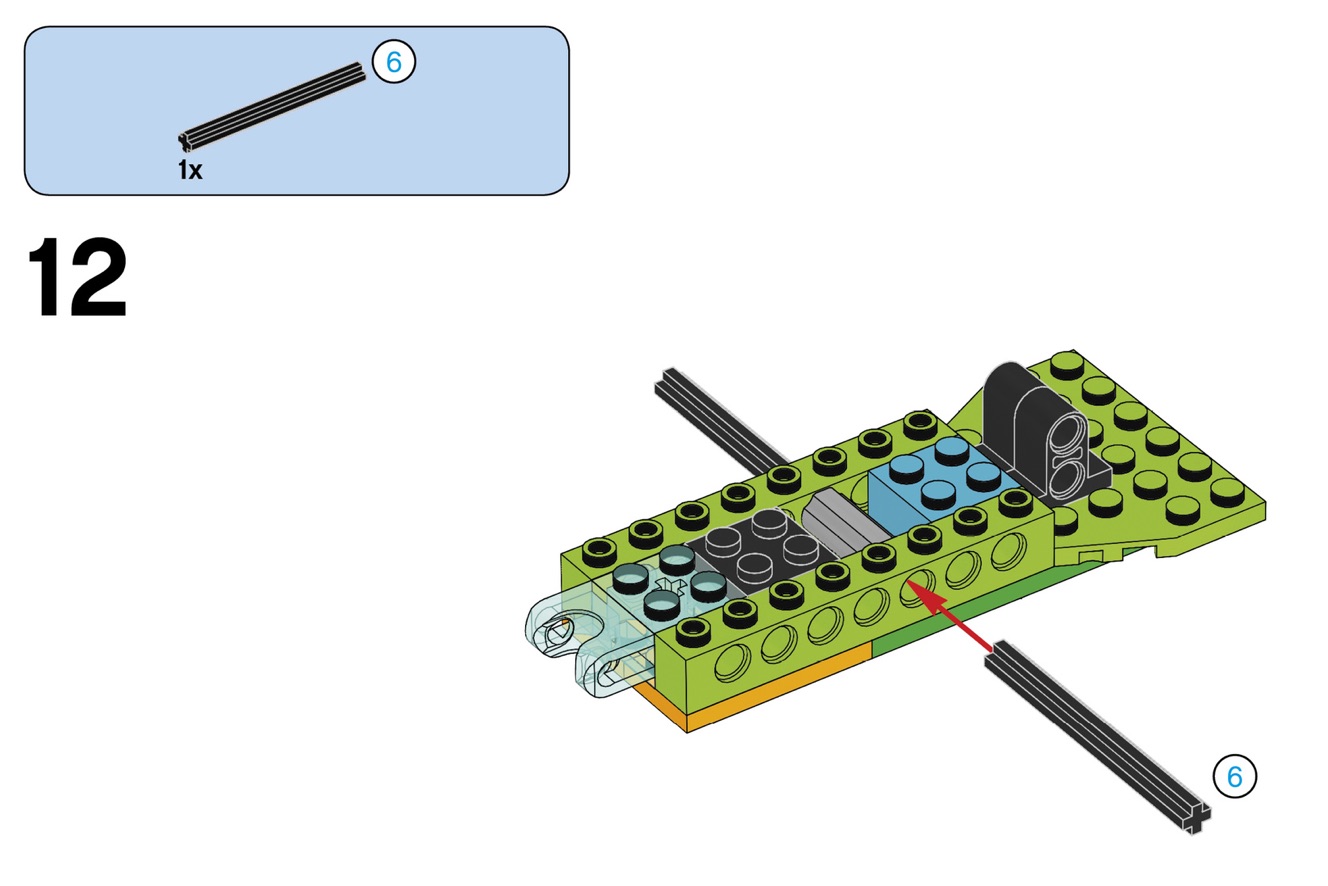
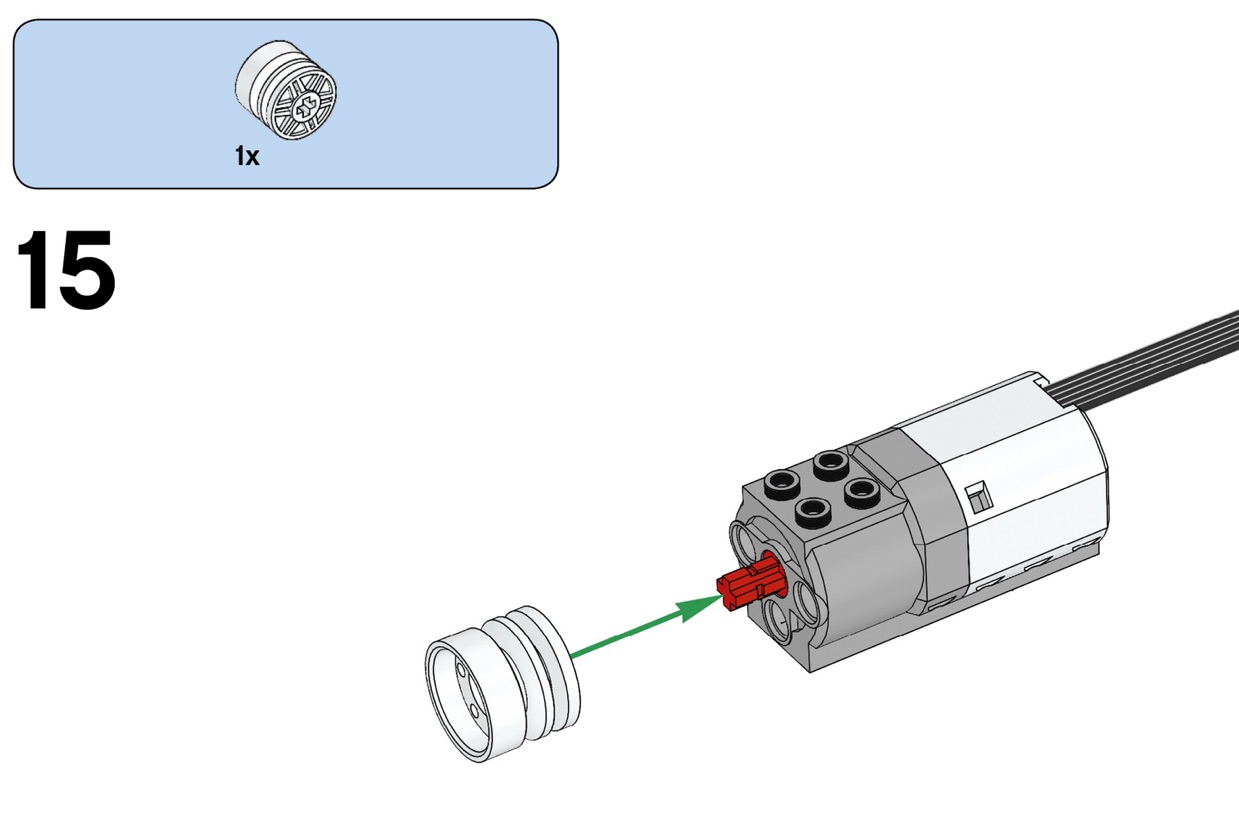
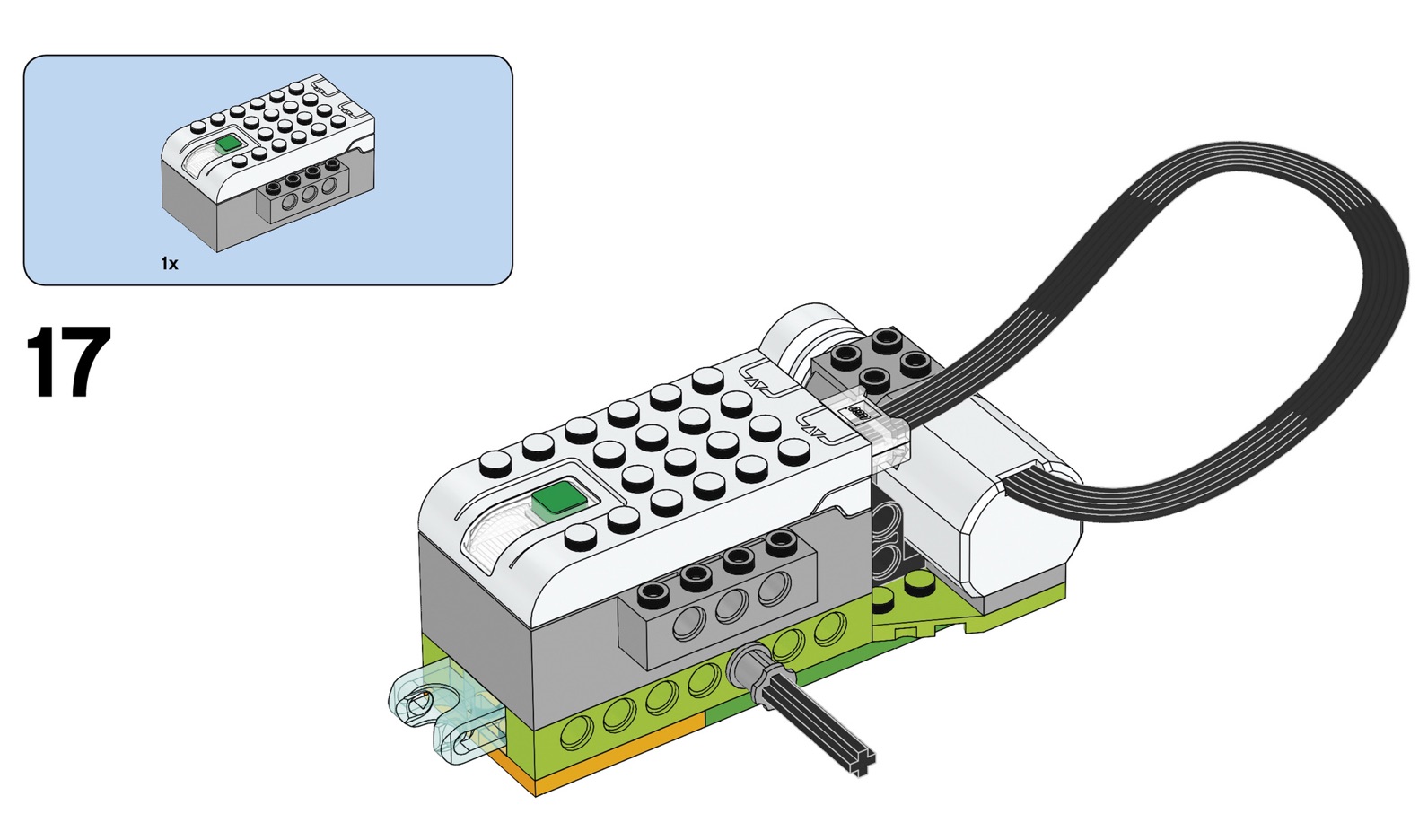
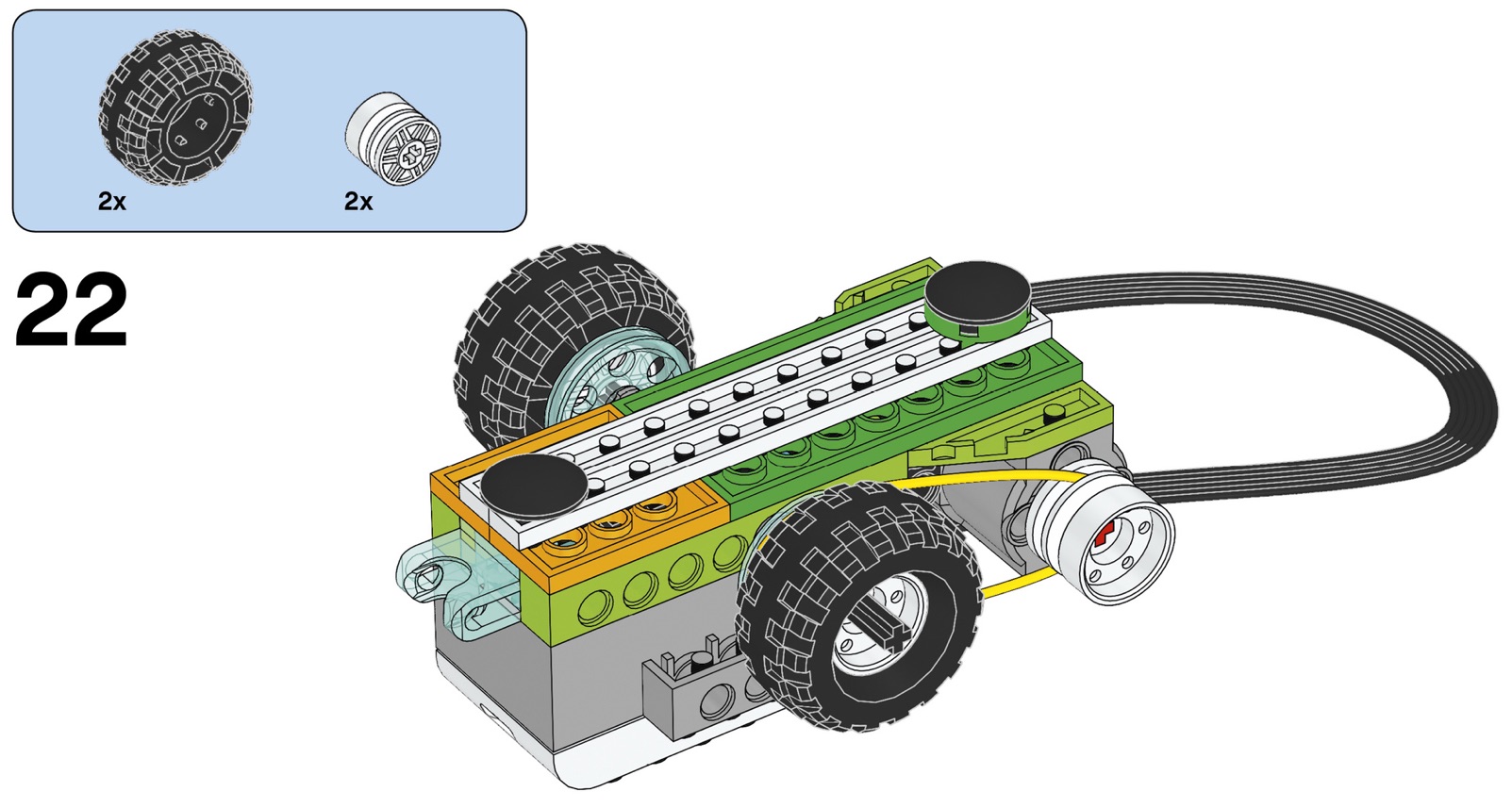
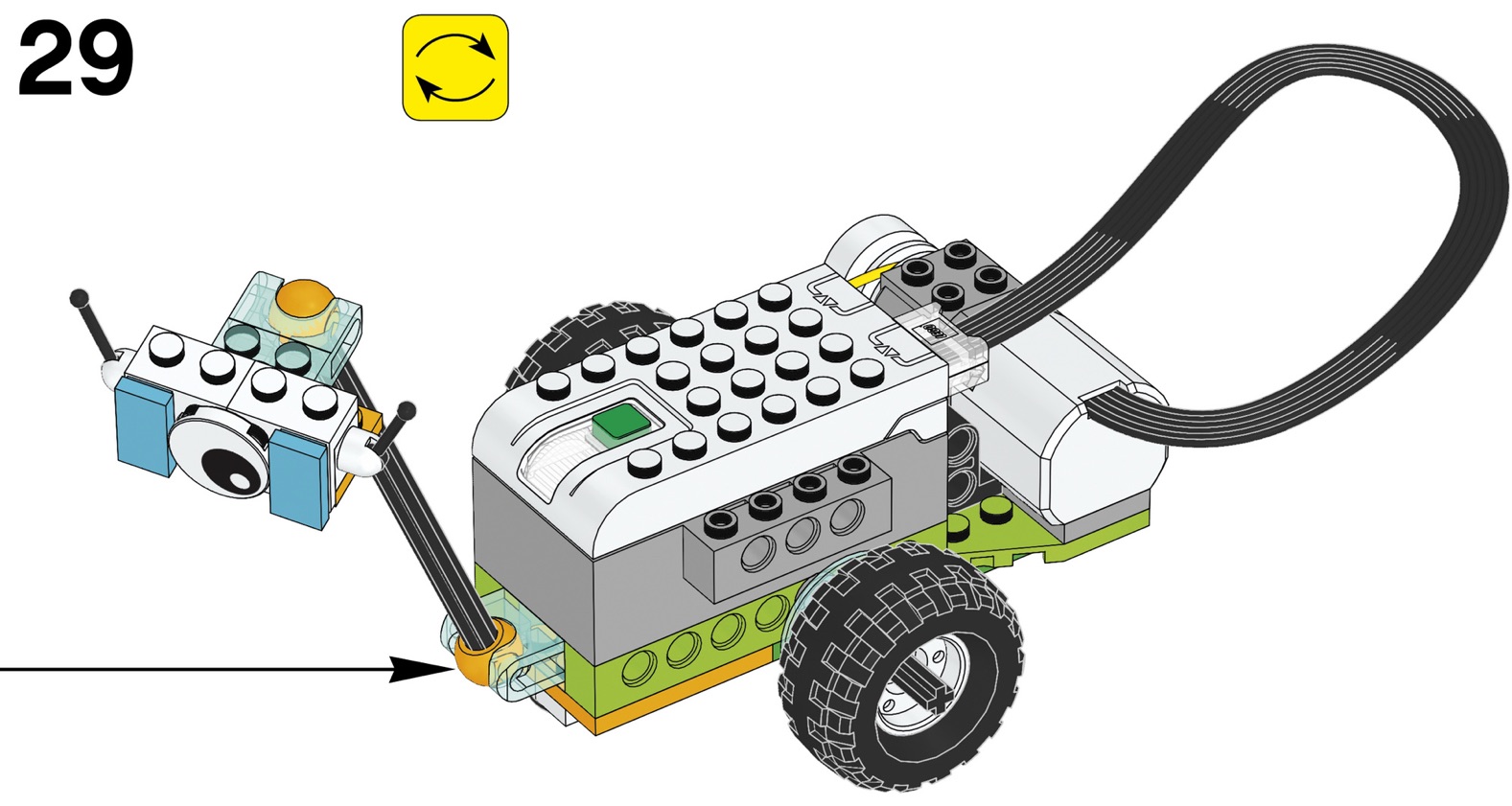
Use the bricks from the provided building instructions to create a Milo Rover that can move forward. There are 29 easy steps provided to build Milo.
Here are a few pictures from the Milo the Science Rover building instructions:
Turn on the Smarthub (green button on top) and connect it to your device.
Program Milo to move forward with the provided program.
Experiment and change the parameters of the program and see what happens. Can you make Milo move forward further, faster?
Have your child document how Milo can help discover remote places.
Have your child take a picture together with Milo.
You can also add additional sensors to Milo (from the top):
Motion Sensor: This will let you create and program Milo’s object detector arm using the Motion Sensor Input. The sensor will be able to detect objects. You will have to use the program provided.
Tilt Sensor: This will let you create and program Milo’s messaging arm using the Tilt Sensor. Milo will be able to send a message about his discoveries. You will have to use the program provided.
NASA’s Mars Exploration Rover (MER) mission is an ongoing robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the sending of the two rovers: MER-A Spirit and MER-B Opportunity—to explore the Martian surface and geology.